¶ Overview
Can prevent a robot joint from moving
Fatigue in a robot joint can be induced by joint inactivity (no new demand is coming for the joint) when maintaining an unnatural position for an extended period.
See also: Thermal Model
The Fatigue refers to a sophisticated capability in our embedded motor drives to assess and monitor the mechanical stress and discomfort experienced by the robot while performing tasks that involve prolonged or uncomfortable positions. This feature plays a crucial role in enhancing the overall efficiency, safety, and longevity of robotic systems by ensuring that the robot operates within its mechanical limits and avoids potential damage or wear caused by extended periods of stress. Three crucial parameters, namely the timeout, duty cycle threshold, and enable, can be individually configured for each motor, allowing for customisation settings. When the fatigue threshold is reached for a specific motor, that motor is automatically disabled until a new demand is received.
¶ Parameters
¶ Enable
The enable parameter determines whether the fatigue feature is activated or deactivated. When the enable parameter is set, the fatigue feature is active, allowing the robot to monitor and respond to potential motor fatigue. Deactivating the enable parameter would suspend the fatigue feature, allowing manual control without fatigue considerations.
¶ Duty Cycle Threshold Parameter
The duty cycle threshold is a critical component of the fatigue feature. It defines the maximum allowable duty cycle for the motor. Duty cycle refers to the proportion of time the motor spends in an active state compared to the total cycle time. When the duty cycle surpasses the defined threshold, it signals the initiation of the fatigue feature.
¶ Timeout Parameter
The timeout parameter is initiated when the duty cycle surpasses the threshold. It represents the duration since the last time the demand for the motor was changed. This parameter prevents the motor from being continuously engaged in the same task for an extended period, reducing the risk of fatigue and potential damage.
¶ Fatigued
The Fatigued parameter indicates whether a specific motor is in a fatigued state. This parameter is activated when the motor's fatigue threshold is reached, and the motor is automatically disabled. It remains active until a new demand is received, signalling that the motor has recovered and can resume operation.
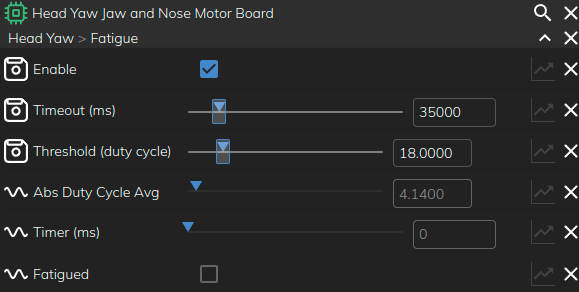
¶ Example fatigue parameters
Fatigue parameters can be accessed from the Devices Page.