Ameca Desktop is a head-and-shoulders, interactive, fully programmable desktop humanoid robot.
The robot is designed for entertainment, education and research applications. It has 32 degrees of freedom, consisting of 5 in the neck and 27 animating the eyes, lips and other facial features.
The robot includes microphones, cameras and a speaker to enable two-way audio-visual interaction.
All Engineered Arts robots are powered by the Tritium software platform.
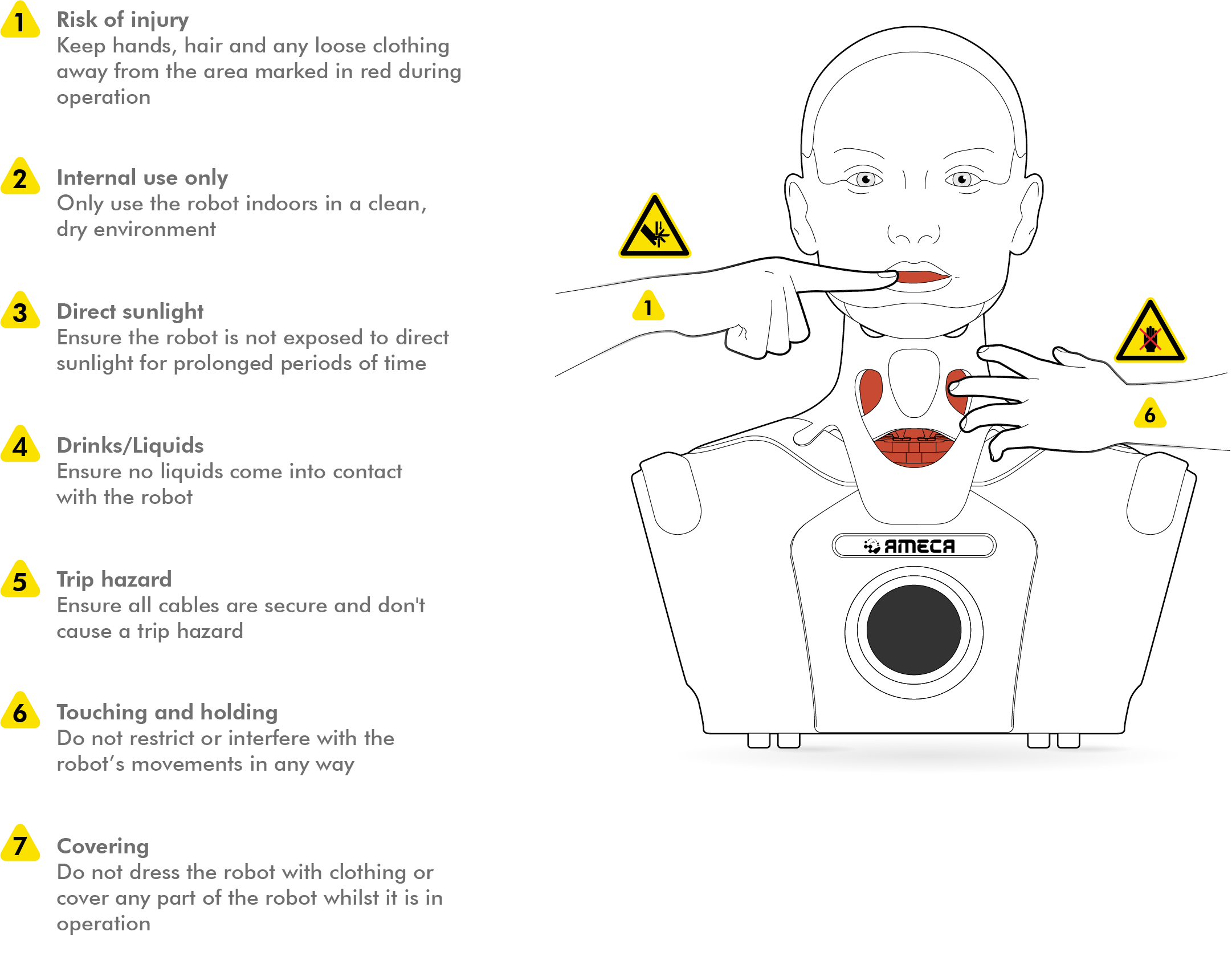
¶ Safety Instructions
Disconnect from Power
Ensure the robot is disconnected from the power supply before attempting to move, maintain or adjust any part of it.
Wiring and Circuitry
Do not attempt to modify or otherwise interfere with the electrical connections and/or circuitry of the robot.
Do not attempt to power the robot from any other source than the manufacturer-supplied power supply.
Any such modifications or interference may lead to dangerous situations that endanger the life of operators or other persons in the vicinity of the robot. Such modifications or interference will void any manufacturer warranty for the robot.
Finger/hand Pinch Hazard
Take great care when touching or working with any of the robot's moving parts. The robot can be manually moved in the unpowered state - there are multiple points where fingers and or hands might be pinched by a mechanism in such an event.
Never attempt to touch or work with any of the robot’s moving parts when it is operational or connected to the power supply.
Robot Condition
Only use the robot if it is in good mechanical and electrical order. Never attempt to install or use a robot that has been subject to damage, including but not limited to:
- contamination by liquids
- contamination by dust / swarf / particulates
- mechanical impacts / drops etc.
- exposure to extreme temperatures or humidities
If in doubt, always refrain from using the robot and contact the manufacturer for advice.
¶ Intended Use and Limitations
¶ Intended Use
- the robot is designed for purposes of entertainment and/or research and development only
- the robot is designed to be installed in a visitor attraction, research laboratory or similar venue, and to be used as an exhibit, attraction or R&D platform at that venue
- as an attraction or exhibit, the robot is designed as an installation that users look at, listen to and talk to
- as a research platfrom, the robot is designed as a hardware device to execute customer software algorithms as part of their research activities
¶ Limitation of Intended Use
- the robot is not designed for any type of physical interaction, either with human beings, animals or any other physical object, with the exception of manufacturer supplied or approved accessories
- the robot is not designed to operate outdoors, in wet environments, in conditions of unusually high or low temperatures or humidities (see also: Operating Environment)
- the robot is not designed for any purpose other than entertainment and/or research and development (for example, it is not designed for delivering important factual information such as building fire escape directions or medical diagnoses)
¶ Operating Environment
The robot is suitable for indoor use only. Recommended environmental conditions:
| | Room temperature: 10-30°C (50-86°F) |
| | Humidity: 45-60% |
- the robot must not be used, stored or transported in a wet environment where it may be exposed to leaks, splashes or other sources of liquid contamination (e.g. near swimming facilities, ornamental water features etc.).
- the robot must not be used, stored or transported in an excessively dusty environment where it may be exposed to particulate contamination (e.g. machine workshops, construction environments etc.).
- the robot must not be operated in an explosive atmosphere.
¶ Unboxing and Installation
The robot weighs approximately 8 kg. Take care and follow good manual handling practices while lifting and moving.
The robot is an intricate and delicate product. Take care to avoid harsh handling, knocks and drops. Careless handling may damage the product.
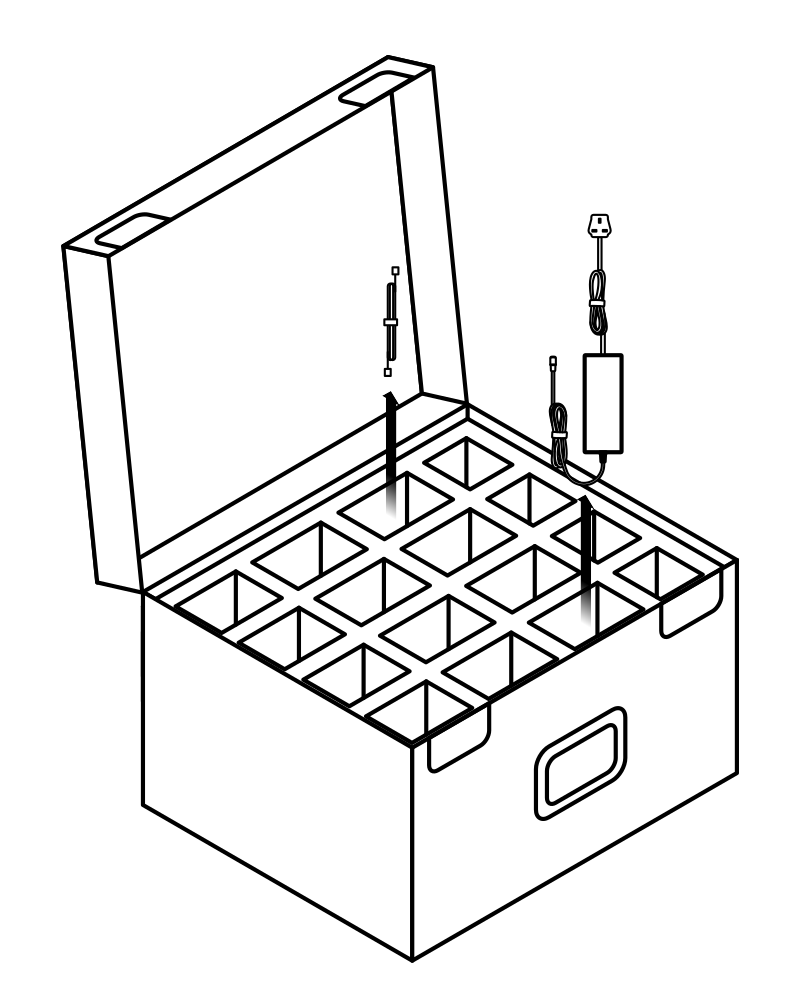


In the event that you need to repack your robot into the shipping box, for example for moving to a different site or return to manufacturer, follow these steps to pack it safely and avoid damage in transit.

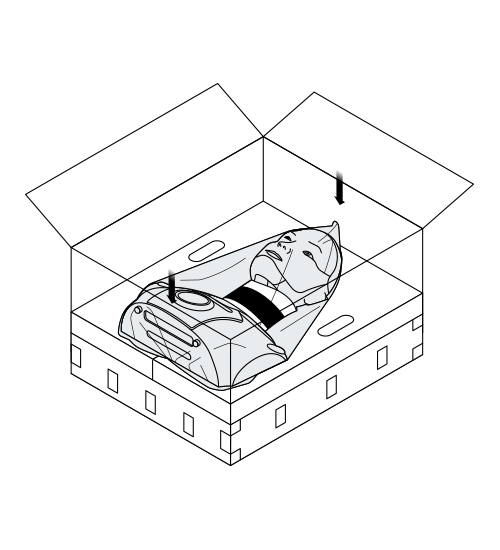
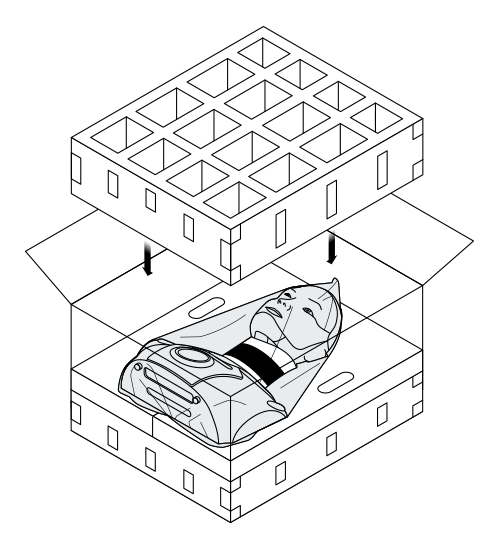
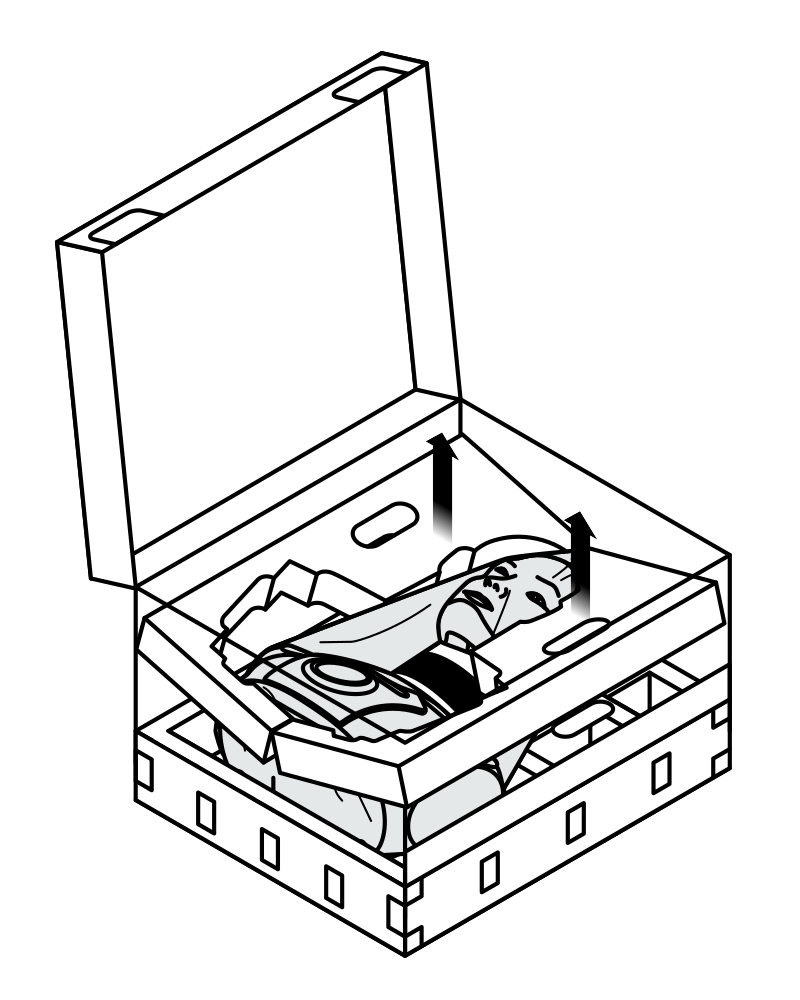
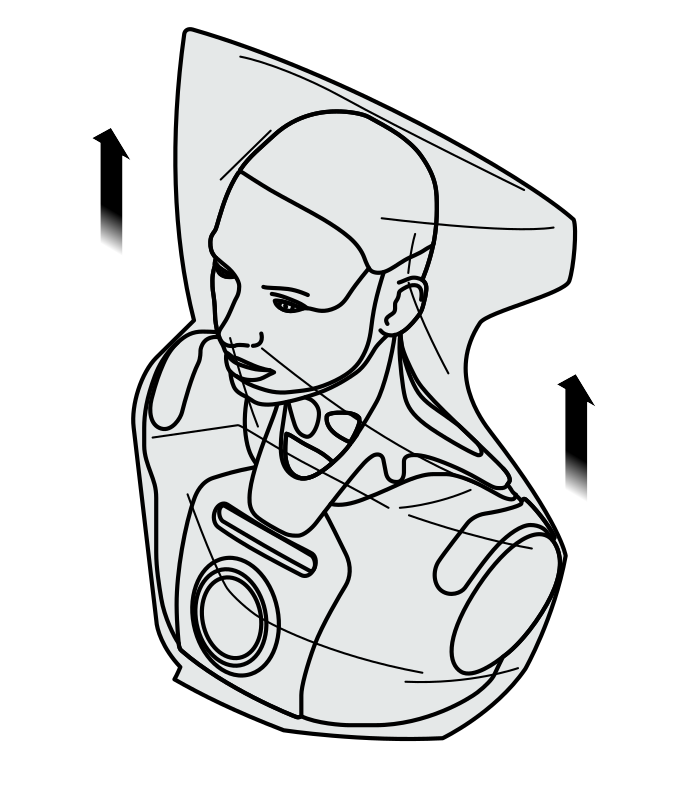
- Remove the robot's torso from the box and place on work surface
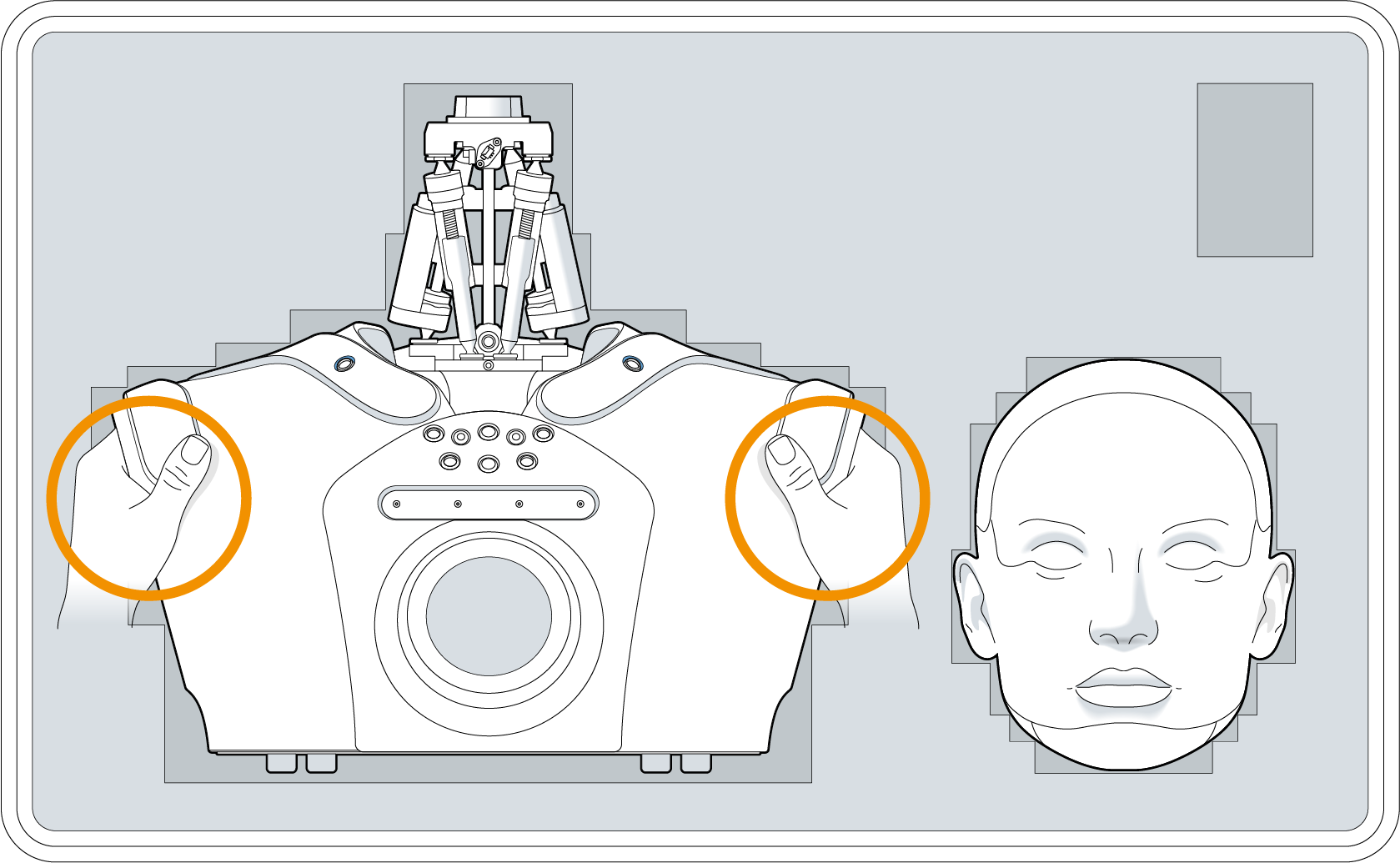
- always grip the robot by the shoulders when removing from the shipping box and handling
- handling locations are indicated in the image below
- always place the robot on a clean, dry, flat surface, away from any drops/edges
- always ensure good clearance between the robot and any other materials or equipment
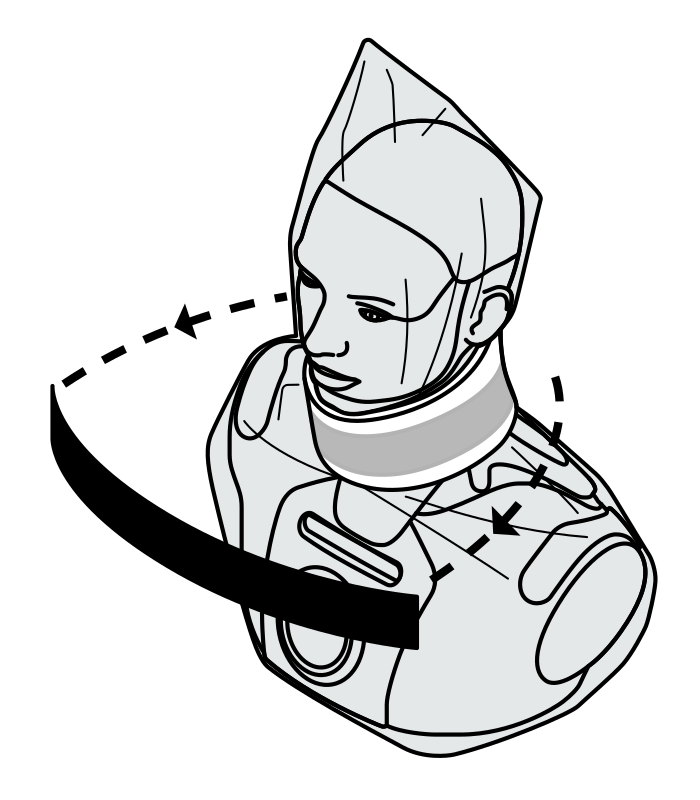
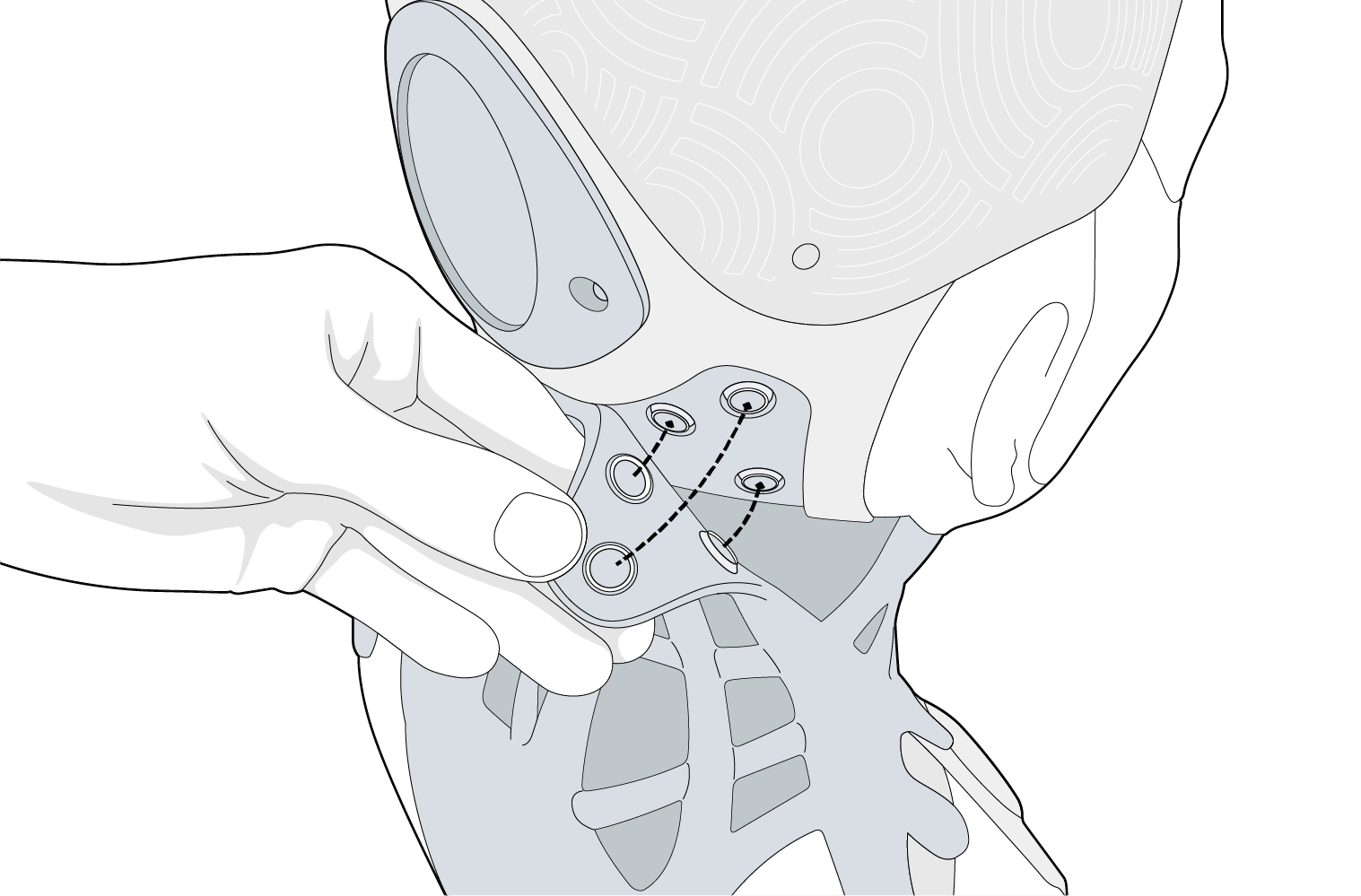
- Remove the silicone neck from its packaging and drape over the torso as illustrated
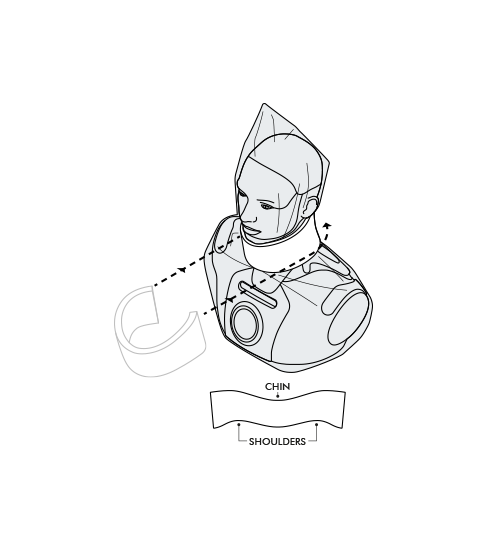
- Fasten the press-studs around the lower edge of the neck silicone to the torso
- 6 poppers on the front
- 6 poppers at the back
- 2 poppers across each shoulder
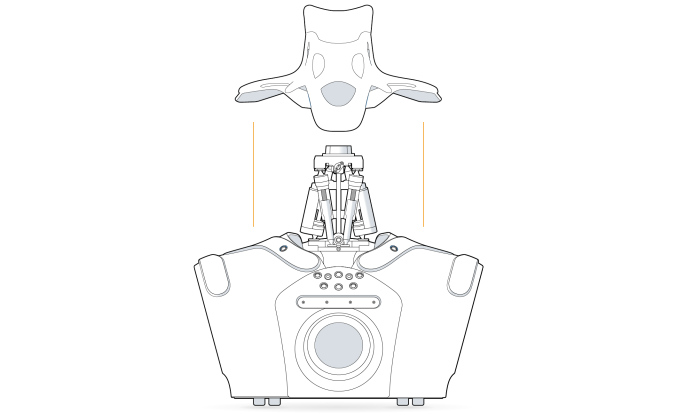
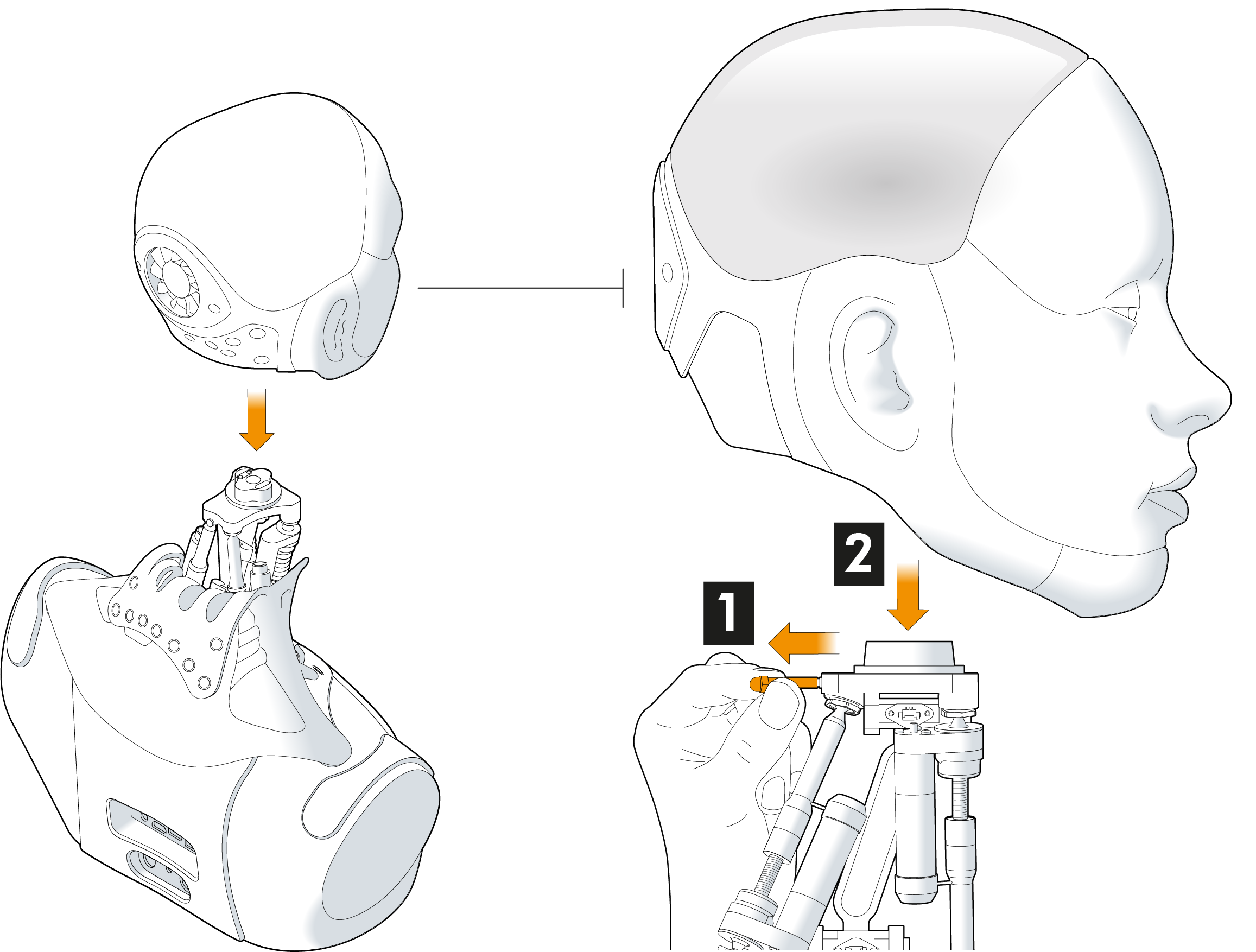
- remove the head from its packaging and lower on to the neck
- the head must be secured with the locking pin to properly install
- retract the pin by hand and ensure the head is firmly located on the neck
- to complete the head attachment, ensure the locking pin returns to its fully inserted position
- the head must be secured with the locking pin to properly install
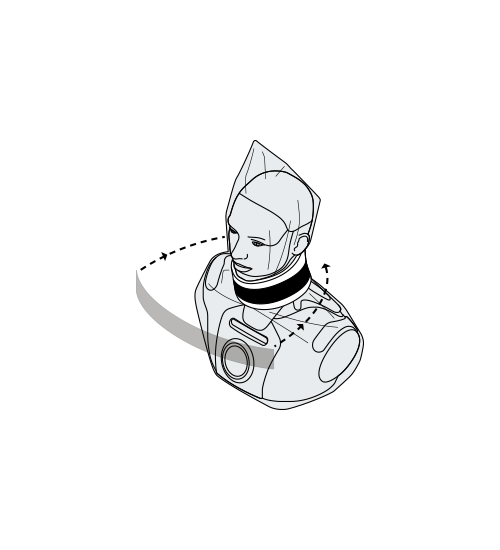
- Fasten the press-studs around the upper edge of the neck silicone to the head
- 9 around the back of the head
- 2 under the chin
- 1 on each side under the jaw
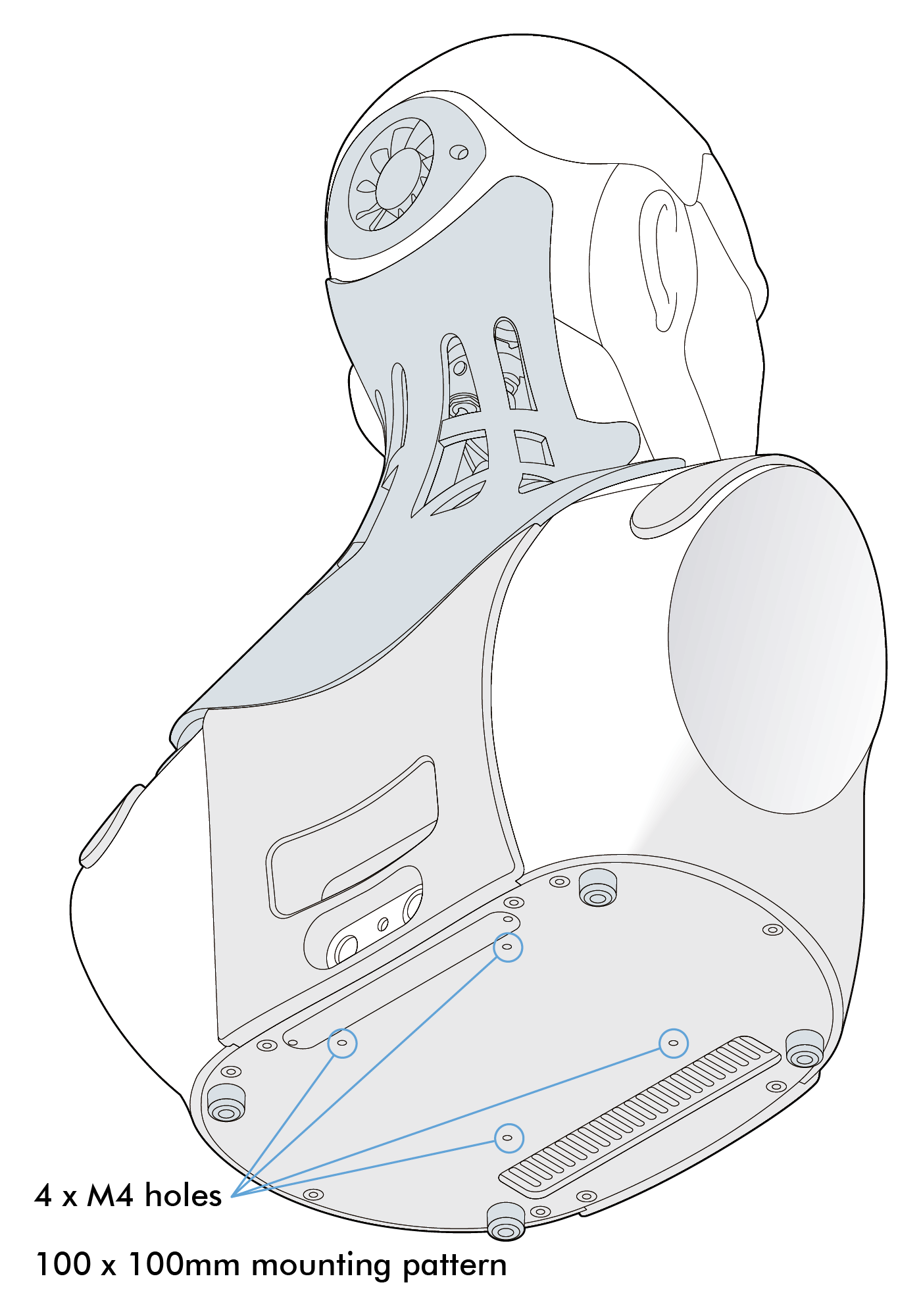
¶ Installation Position
- the robot must be positioned on a flat, level surface
- keep away from edges where the robot is vulnerable to being knocked off
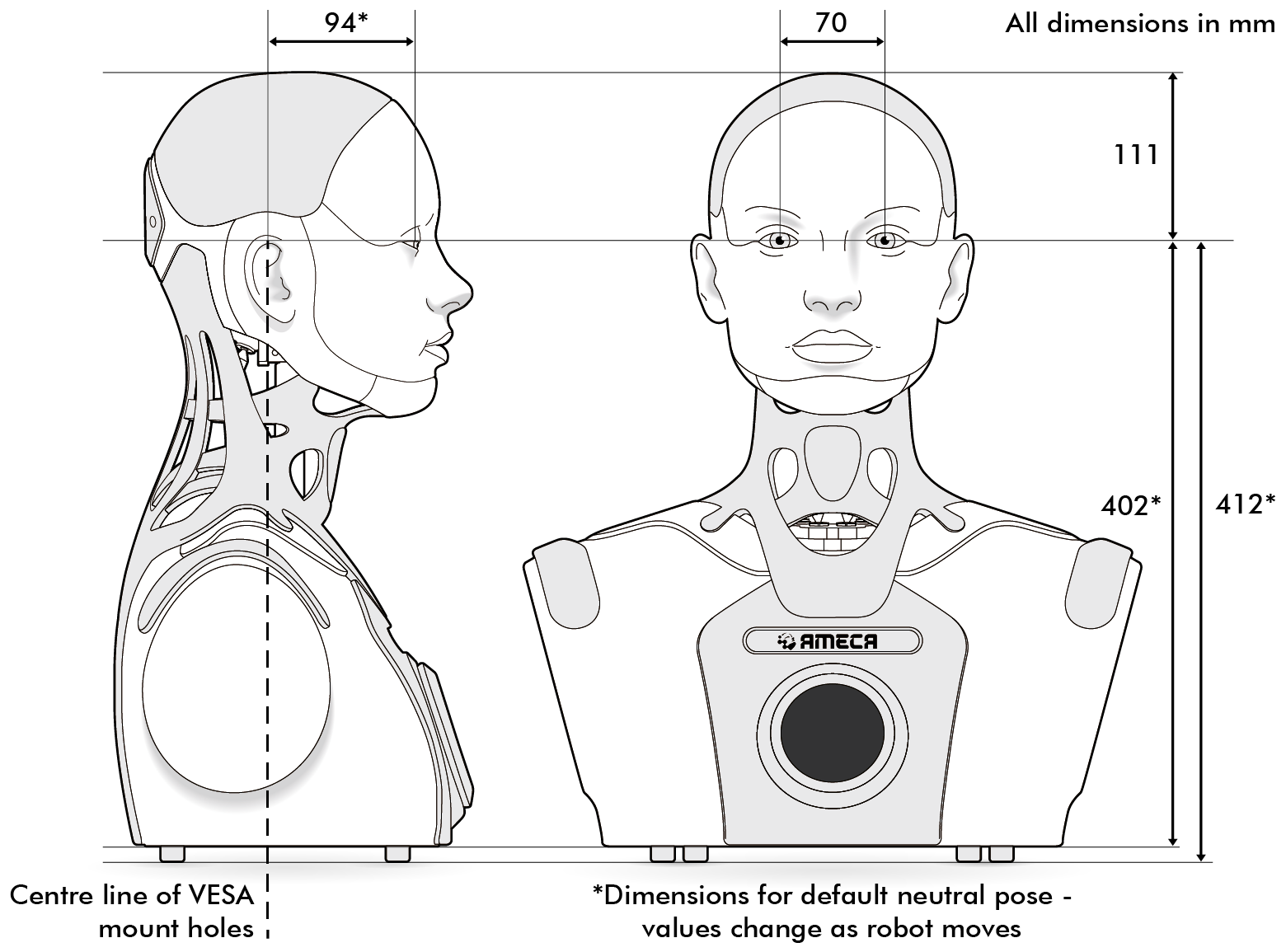
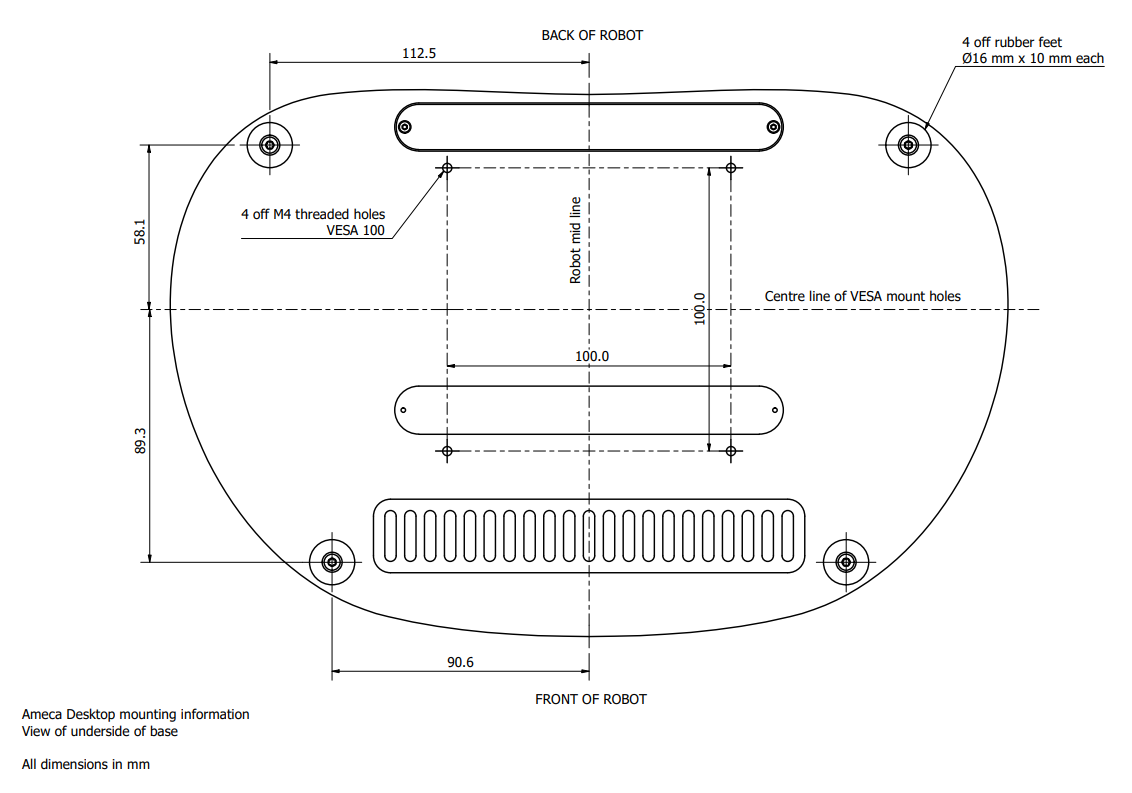
- optionally, the robot may be secured in place via four M4 screws, arranged in a VESA 100 pattern
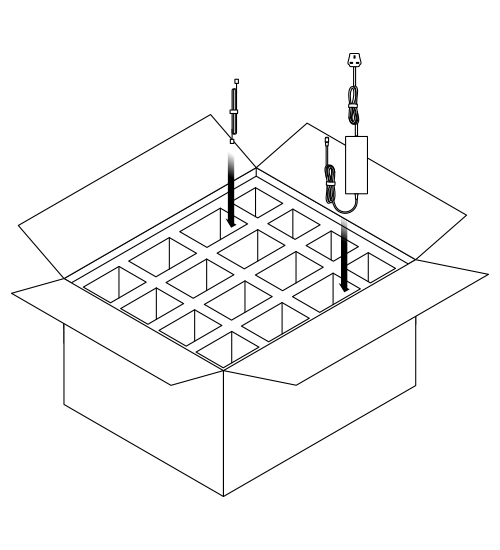
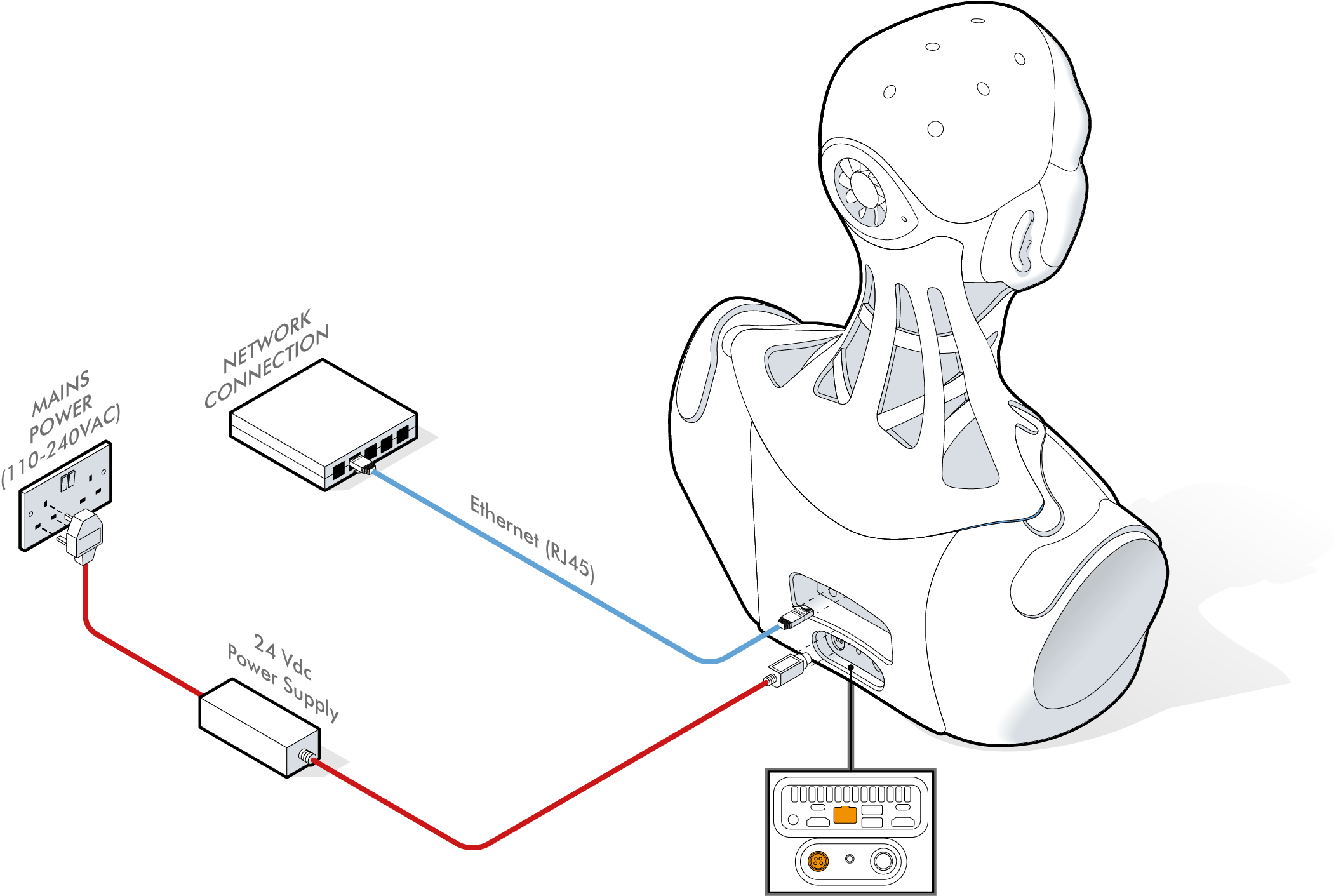
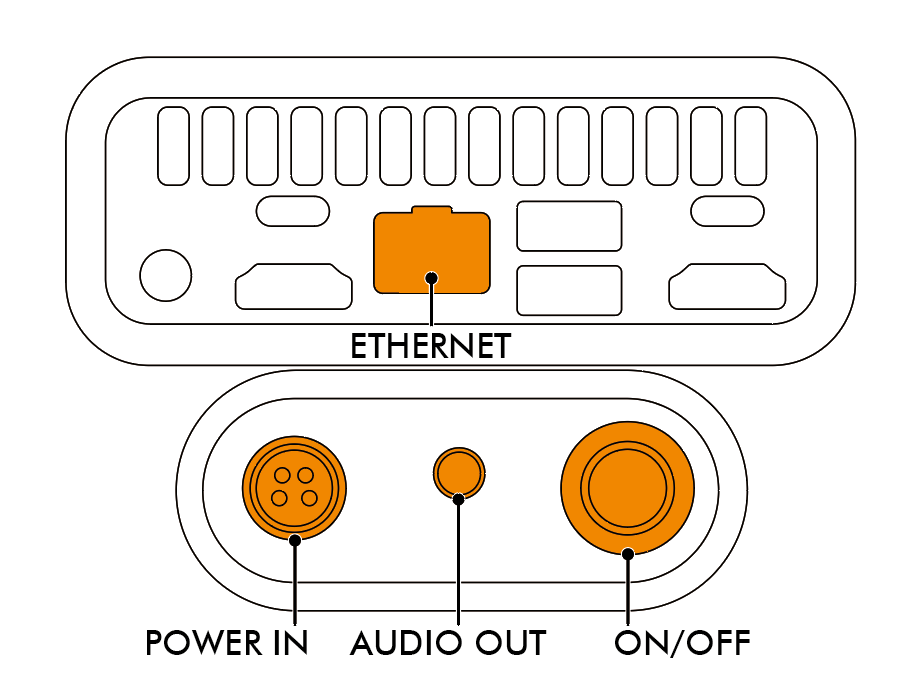
¶ Cable Connection
- connect the 24 Vdc power supply to the robot and the to mains power outlet
- always use the manufacturer supplied power supply
- connect the robot to the internet via a wired ethernet (RJ45) connection
¶ Powering On and Off
¶ Powering On
- use the push button to power the robot on
- the robot will take approximately a minute to start up
- during startup, the robot will perform an automatic self-calibration routine
- the robot will move its degrees of freedom during self-calibration
- do not touch or interfere with the robot during startup
¶ Powering Off
- short press the push button (with blue LED) to start the robot shutdown sequece
- do not hold the button down as this will cut power after 10 seconds
- shutdown can take up to a minute
- when the shutdown is complete, the blue LED will go out
¶ Operating Instructions
The robot is operated using Engineered Arts Tritium software platform. The Tritium user interface is 100% web based, and can be accessed from any internet-connected computer without any installation on your local machine.
To get connected to your robot and start exploring its functionality, see the Getting Started page.
¶ Degrees of Freedom
The robot has a total of 32 actuated degrees of freedom.
The robot is build up from a number of modules. Please see the individual module pages for documentation of how that modules moves and is controlled.
The Ameca Desktop robot includes the following modules:
Brow Module v3 - motion of the eyebrows and nose
Eye Module v4 - motion of the eyeballs and eyelids
Lip Module v2 - motion of the jaw and lips
Neck Module v6 - overall head and neck motion
¶ Head LEDs
Learn what each LED colour on your robot signifies, from operational and interaction modes to alerts here.
¶ Expressions
Ameca Desktop is equipped with a range of expressions.
See expressions for more details