
Some Engineered Arts robots are fitted with LiDAR (Light Detection and Ranging) safety sensors. These detect people approaching too close to the robot when it's operating and cut the power to the motors to prevent the risk of injury, or damage to the robot.
Warning
Do not attempt to modify, disable or otherwise interfere with any LiDAR safety sensors or associated systems on your robot.
These features are provided as a protective health and safety measure.
Any attempt to modify, disable or otherwise interfere with any LiDAR safety sensors or associated systems on your robot may result in dangerous situations leading to injury to persons in the vicinity of the robot.
¶ Functionality
The LiDAR sensors operate on the basis of a zoning system - one or more safety zones can be pre-programmed into the system to determine the boundaries of the protected area around the robot.
¶ Primary Safety Zone
The primary safety zone is designed to protect human safety. When a person or object is detected inside the primary safety zone, the system immediately cuts power to the robot's motors, preventing the robot from moving and thus eliminating the risk of harm from any contact between people and the moving parts of the robot.
(Note: power is cut to the robot’s actuators from the neck down. Power to the robots control computer, logic circuits, speaker and facial movements remains)
During the installation of the robot, safety zones are configured based on the specific environment in which the robot will operate. This process ensures that the robot operates safely within predefined boundaries. In a typical installation, the primary safety zone will form a circle around the robot with a diameter of at least 3.2 metres.
¶ Resetting after a Safety Event
Once the LiDAR has been triggered by detecting a person or object inside the primary safety zone, it will keep the power to the motors off for as long as persons or objects remain in the primary safety zone. Once the LiDAR detects that the primary safety zone is free of persons or objects, it will reconnect the robots motors to the power supply after a pre-configured time delay. The time delay is set at a period of 5 seconds by default; this can be increased at installation if required. During this time the robot will be unable to move. The primary safety zone must remain clear of persons and objects for the duration of this delay in order for power to be restored.
¶ Startup Behaviour
Since the power switch for Ameca is located on the robot itself, when you turn the robot on, you will by default be standing within the primary safety zone. This means that the robot will not move or commence its startup and calibration procedure until you have exited the primary safety zone, the safety reset delay has elapsed.
¶ Secondary Zone
The robot can be configured with with an additional monitored zone (outside the primary safety zone) that can serve a variety of purposes. Secondary zones may trigger warnings or induce alterations in the robot's behaviour, allowing for a flexible and responsive approach to different scenarios. This capability ensures that the robot not only prioritises safety with an immediate stop in the safety zone but also provides responses in other designated zones, contributing to a secure environment.
By default, the secondary safety zone is not active or configured during a typical installation.
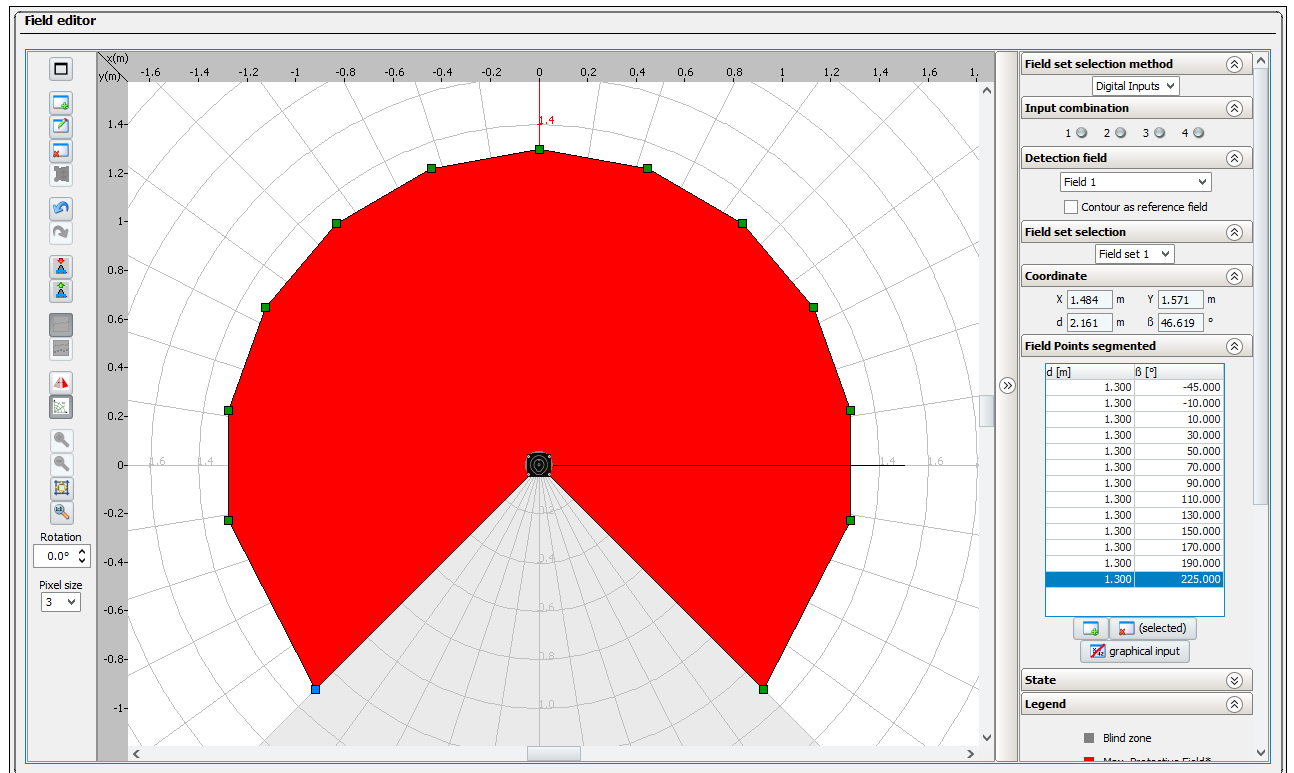
¶ Setting and Modifying Safety Zones
In general the LiDAR sensors and associated system are not user adjustable parts; they are set during your robot installation, and then operate autonomously.
For users that require modifications to the LiDAR system settings after the initial installation (for example if the robot is moved to a different location requiring a different safety field configuration), please contact us for assistance.
¶ Safety System Manual Override
The safety system may be manually overridden for purposes of maintenance and troubleshooting.
Warning
The safety system must not be overridden for any purpose other than maintenance and troubleshooting by an individual with suitable training and experience with the robot. Doing so may lead to dangerous situations resulting in injury to persons in the vicinity of the robot.
The robot must not be left with the safety system overridden in normal operation.
To override the LiDAR safety system:
- remove the two front thigh panels from the robot
- remove the front abdomen silicone from the robot
- remove the front pelvis shell form the robot
- on the robot’s right hip is a key-operated switch. Insert the key and turn to the override position, marked with a warning triangle
- the LiDAR sensors are now disabled, and the robot will operate normally even when there is a person or object within the LiDAR primary safety zone
- reverse these steps to re-enable the safety system
¶ Viewing the Lidar data
The configured Lidar safety zones, detected perimeter including any infringements can be viewed in realtime in Viz:
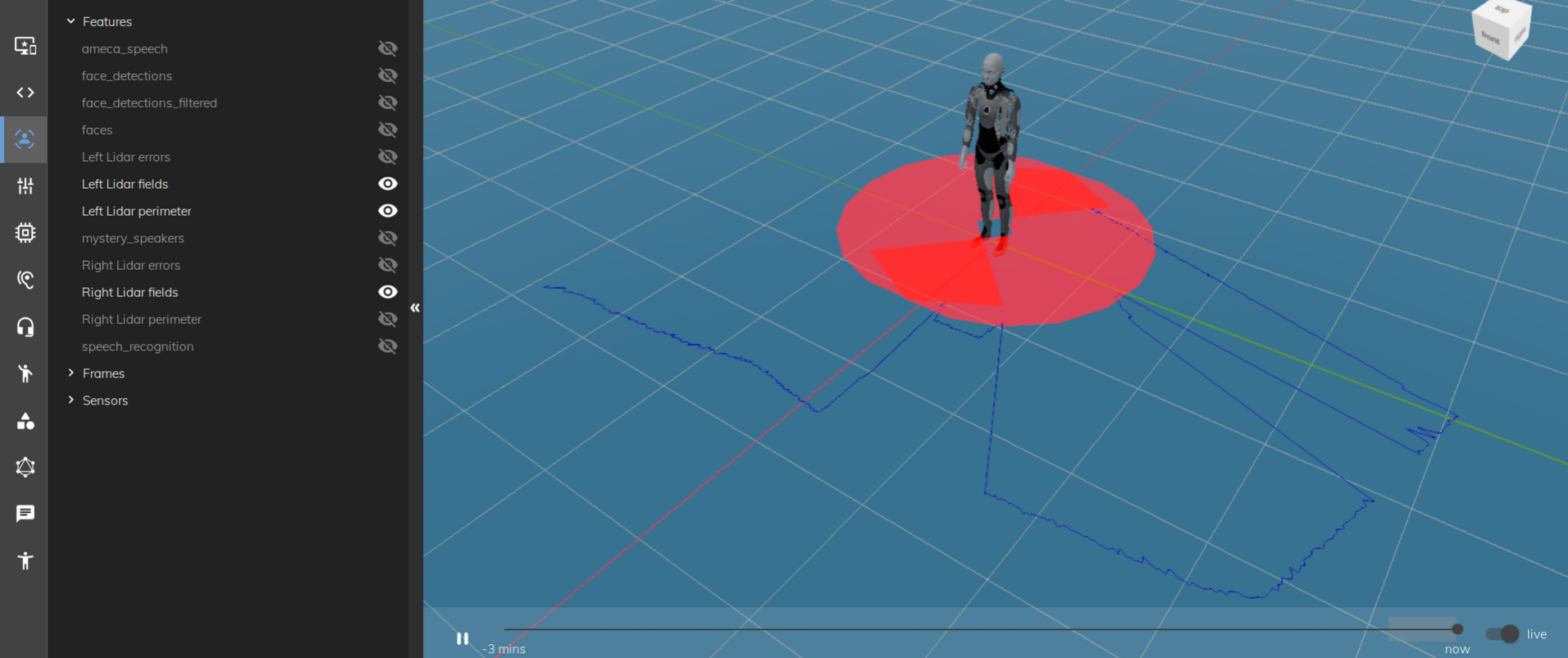
You can view the configuration and data for both the left and right Lidar sensors individually or simultaneously by using the visibility toggle in the Features panel on the left.
The blue line indicates the live perimeter, the closest point the Lidar can detect. In the screenshot, only the left perimeter is shown, and it enters the safety zone. For the Lidar to deem the area safe, this perimeter line must not cross into the configured safety zone. In the screenshot above, the safety zones are red, indicating they have been infringed upon. During normal operation, these zones appear yellow.
In some cases, the robot may operate near a wall or another static feature, requiring a gap in the safety zone. For safe operation, the Lidar must verify that the robot has not moved away from this feature, which could allow a person to approach undetected. In such setups, a different type of zone, which usually appears blue, will be configured to encompass the expected perimeter created by the wall or other feature occupying this space.